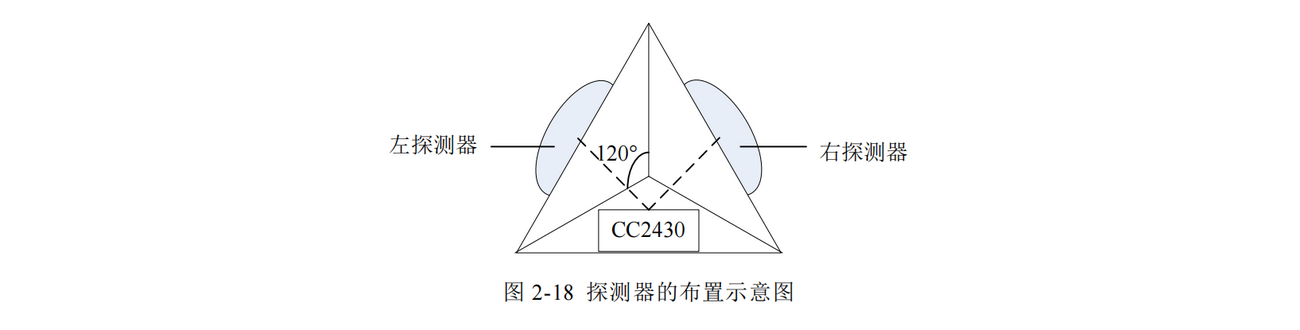
探测器终端是将超声波传感器矩阵和一个单片机系统,组成一个可以探 测周围障碍物的具体位置的探测系统。如果在塔机大臂上安装探测节点,就 可以探测到塔吊臂周围的障碍物,在塔机吊臂周围形成线性保护区。当有障 碍物进入吊臂周围时,超声波传感器矩阵利用超声波测距的方法检测障碍物 的距离,单片机系统采集每个传感器的测试信息。并通过无线通信模块传给 主控器。当障碍物到塔吊臂的距离小于安全距离时发出报警信号,以使工作 人员及时的进行变幅、回转、停机等避障措施,防止碰撞的发生。 塔吊臂作业空间宽阔,需要在 360°范围内检测障碍物。塔机吊臂剖面呈 等边三角形,左右两侧最容易发生碰撞,每个探测器的范围在 120°左右,超声波传感器的覆盖范围有限,所以探测器是由多个超声波传感器按矩阵排列 得到。由一个 CC2430 模块控制左右两个探测器,图 2-13 表示终端节点的结 构图,左右探测器与 CC2430 模块通过接口连接。

超声波模块
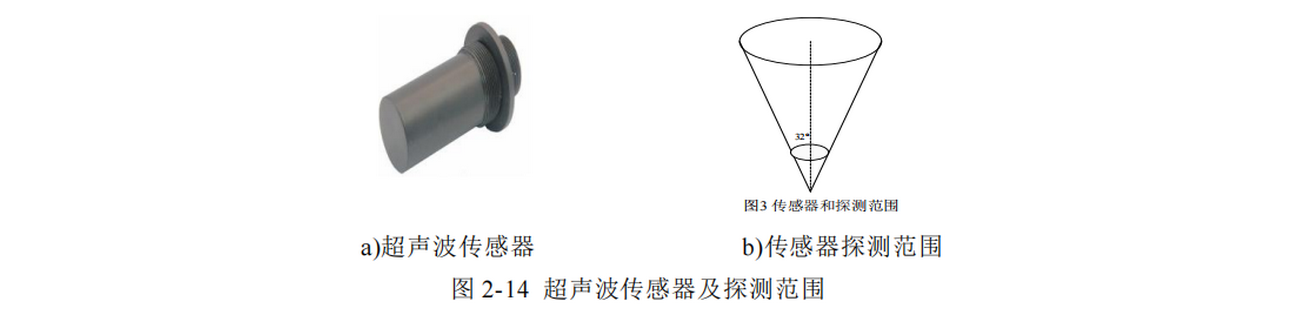
塔机吊臂上安装的探测节点,在塔机吊臂周围可以形成线性保护区。超声波传感器方便安装,并且超声波抗干扰能力强,所以用超声波测距方法进行塔吊防碰撞系统的研究有良好的发展前景。超声波传感器可以接收和发出超声波,传感器的探测范围如图2-14所示,超声波呈圆锥形向外发出,根据不同的传感器型号,探测距离不同;当物体进入超声波探测范围内时,传感器能检测到前方或旁边的物体。本设计传感器选择大禹公司DYA-35-10A,传感器探测范围为10m,精度达到0.6m,超声波感应角度为32°要使用超声波传感器进行防碰撞保护,必须加宽其检测范围。
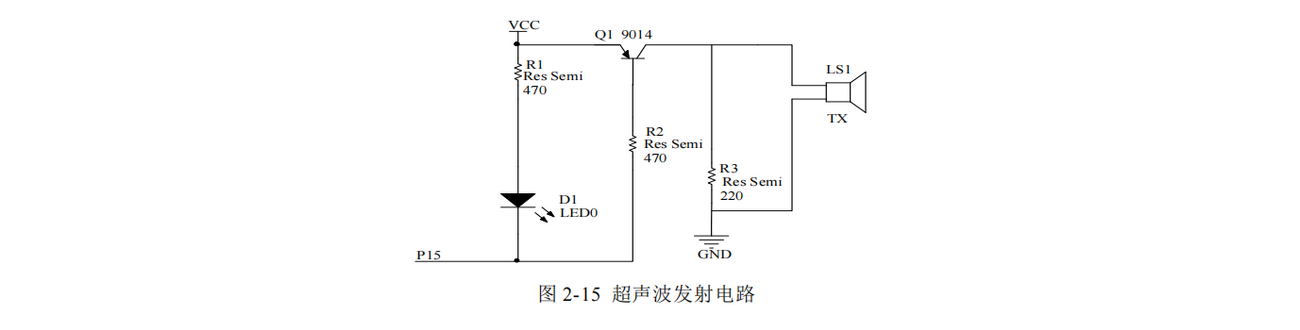
超声波是一种利用回波测距的检测装置。传感器分为接收和发出超声波两个部分,超声波发射电路发出超声波信号,超声波信号碰到障碍物后反射回来,由超声波接收电路接收。超声波发射电路如图2-15所示,接收电路如图2-16所示。

超声波测得的距离是指二倍的传感器到障碍物之间的长度,测距原理是指从发出超声波到接到超声波所经过的时间,再乘以超声波的传播速度。即超声波传感器的测距公式其中c为空气中超声波传播速度;k为近似为 0.5 的系数:T为时间。
D=kcT
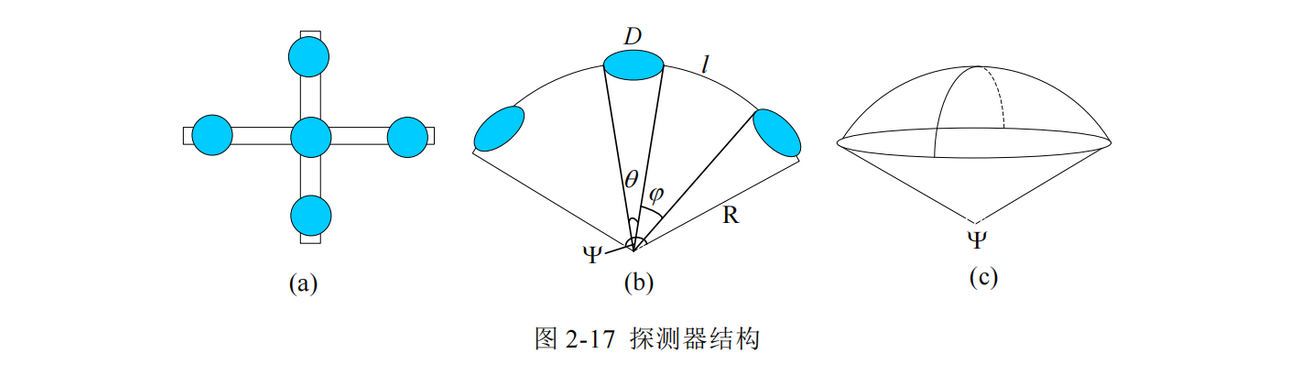
探测器结构设计由于超声波传感器方向性强,形成了波束角,一般在30°左右。为了有效拓宽检测范围,可以将超声波传感器布置成阵列的形式,在“传感器数量少,检测范围宽”的原则下,对传感器检测范围进行组合,形成一种探测器的结构。本文所设计的探测器是一种弧形十字支架结构,在支架的四端和中间交叉点分别布置5个超声波传感器,如图2-17中a)所示。
探测器的布置
若想以塔机吊臂为中心创建一个10m的线性立体保护区,可以将探测器安装在塔臂左右两侧。根据超声波的特性,不可避免的出现超声波重复覆盖和未覆盖区域,如果有障碍物进入这两个区域,会给影响系统测量的准确性。所以,在对节点进行布置时,应尽量缩小重叠区,避免盲区。图2-18为节点在塔机吊臂的横截面的布置。
对于探测器在塔吊臂上的布置,要保证两个探测器之间可以形成封闭的检测区域,对塔吊臂进行保护,如图2-19,为两个相邻探测器之间的长度,c为交点至超声波传感器的有效距离,h为交点距塔吊臂的垂直高度,得到a的计算公式为式(2-5)。
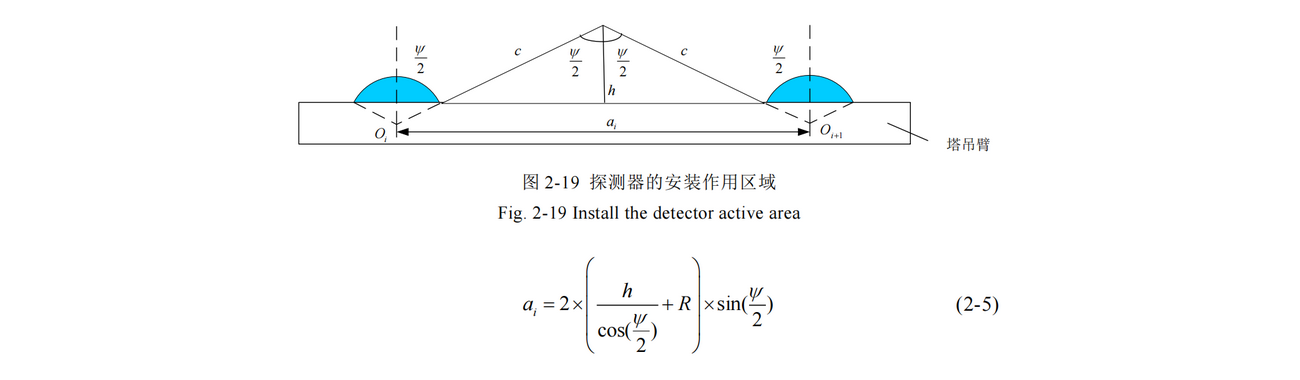
改变安装间距ai或探测区间锥角y的大小,相应地改变高度h。塔吊安全规程中有要求,相邻两塔机的一台吊臂顶端距另一台的塔吊基身至少保持两米的安全距离。所以应保证h £ 2米。
设塔吊臂长为F,那么在整个吊臂内所要安装的防碰撞节点数目n为式其中ROUND 为四舍五入取整函数。
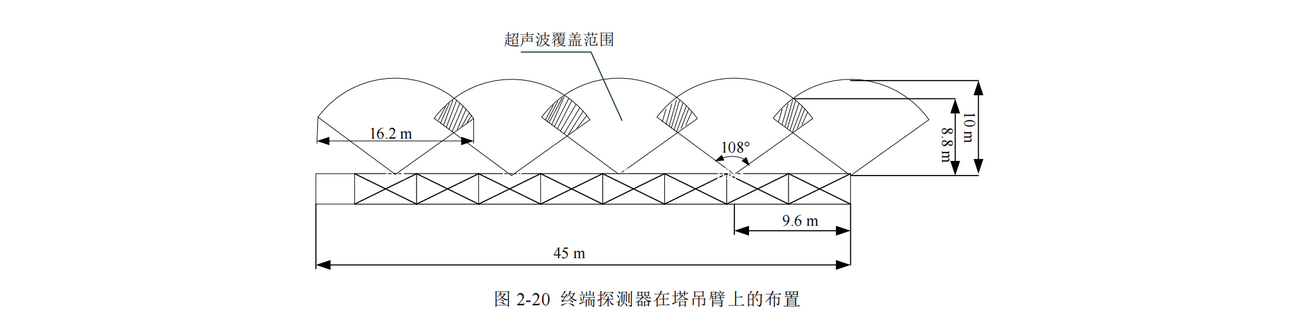
若塔机大臂长45m,平衡臂长12m。对于探测器的布置在平衡臂和或者大臂应该遵循相同的原则,应该在吊臂上设置5个布置点,间距为9.6m。探测器终端节点的分布如图2-20所示。

塔机作业时,可以将超声波探测器由大臂的一侧向控制室方向布置,以塔机大臂作为回转半径,离中心越近的位置,越不容易发生碰撞。其中阴影部分为超声波覆盖的重复区域。按照该方式进行吊臂上传感器的布置,在完成布置任务的同时又达到前传感器之间的重叠区和盲区最小的技术要求。
吊臂上探测器的仿真
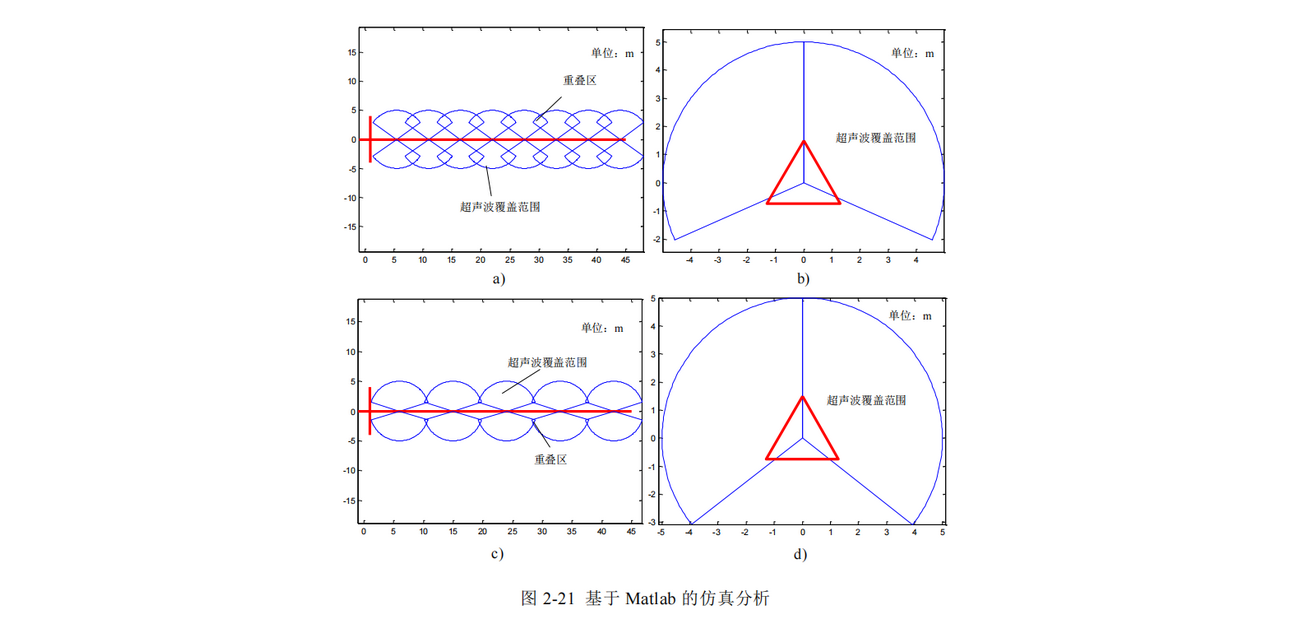
本文所选塔吊型号为QTZ63,起重臂长45m,要在塔臂上布置超声波探测器,构成三维空间的保护区。探测器选择的超声波传感器型号是DYA-35-5A,发散角为32°,该传感器最大探测范围5m,传感器直径为65mm。采用Matlab软件进行计算仿真。按照本文所设计的由5个传感器构成的探测器,测量范围108°。在QTZ63塔吊臂上需要布置8个这样的节点。超声波覆盖区域如图 2-21(a)所示图2-21(b)是相应的剖面图,保护区域从-18°到198°。另外,可以增加探测器的探测区间使探测范围达到了146°。这时只需5个节点即可覆盖整个吊臂,如图2-21(c),并且h只有1.38m。图2-21(d)是相应的剖面图,其作用区域从-56°到236°从以上分析可以看出,如果探测器所用传感器数量少,那么其作用范围窄,而在整个塔吊臂上需要布置更多的节点。而如果要增加探测器作用范围,那么就需要更多的传感器,这样所需要布置的节点相对减少。这需要在工程实践中根据具体情况灵活掌握。
定位障碍物
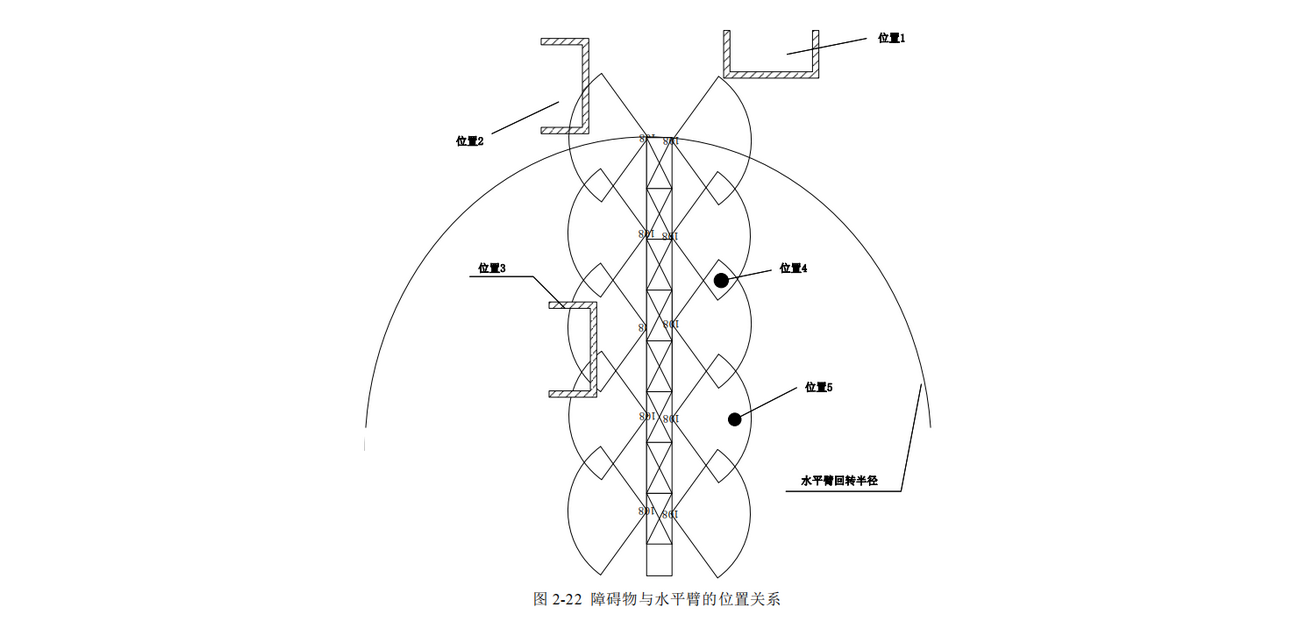
在塔机的施工区域内有建筑物,高压电线,学校,马路等作业危险区域,依照这些物体的特点,将障碍物大致分为角、线、面三类,使障碍物距离和位置更容易确定。随着塔机的运动,障碍物与塔机的位置逐渐改变。建筑物与塔机大臂的位置关系包括2种情况。
1.在塔机回转半径之外,如图2-22中位置1和位置2的障碍物。无论该塔机如何运转都不会有碰撞发生。但是探测器仍然探测到障碍物,可能启动预警,故在塔吊防碰撞系统中应排除这种情况。
2.在塔臂的回转半径之内检测到障碍物,如图2-22中,障碍物3、4、5的位置。塔吊有碰撞的可能,防碰撞的报警系统开始工作,提醒操作人员采取相应的措施,防止碰撞发生。当障碍物进入重叠区域时,将探测器测得多余的信息进行处理,方便障碍物进行定位。
当障碍物4进入测量区域,探测器测得的距离可能不是塔吊臂到障碍物的垂直距离,系统需要对探测器测得的距离信息进行处理,得到垂直距离。
本文总结
本文对塔吊防碰撞系统的硬件部分进行了详细的设计,首先对整个防碰撞系统的主控部分进行了硬件设计。包括中央处理器的设计,采集模块、显示模块、预警模块、电源设备等外围的硬件电路进行设计。接下来进行了无线通信网络的设计,为整个防碰撞系统提供了网络平台。最后设计了一种基于超声波的探测器,并将探测器终端合理安装在塔吊臂上,使超声波信号在塔吊臂周围形成线性保护区,并对探测器的检测范围做了实验仿真,探测器可以精确的定位塔吊臂和障碍物的位置,防止碰撞发生。
西安天网云智慧工地解决方案一直致力于推广西安智慧工地、西安塔吊防碰撞安装调试租赁、西安劳务实名制、AI视频检测等智慧平台相关技术,在工程施工阶段的应用将会为工地数字化管理注入源源不断的强大动力。解决现场施工安全问题,提高管理效率,有效促进了工地管理模式的转型升级。