1.群塔作业防碰撞方案设计
塔吊防碰撞系统,可以通过区域保护来检测吊臂与周围建筑物或者障碍物,有无碰撞的可能,对吊钩和障碍物的碰撞问题,采用其它的运算方法计算出距离,防止塔吊群作业时碰撞发生。塔机群作业防碰撞过程如图 4-1 所示。
2.防碰撞算法研究
在塔吊群作业时,与塔机的吊臂碰撞可以直接通过探测器解决,但是吊绳吊钩与障碍物的碰撞问题,必须要通过算法研究来解决。一系列的算法计算出吊绳或者吊钩与障碍物之间的距离,最后判断碰撞是否发生。采取变幅和回转的办法避免碰撞的发生。目前有多种针对塔吊作业时防碰撞的算法,其中应用最广泛有层次包围盒法和齐次坐标变换两种方法。
层次包围盒法大多用在虚拟现实世界中,是一种判断在某一场景中是否有其它物体的某一部件穿过的检测方法。在塔吊群防碰撞系统中用层次包围盒方法就是用一个球体将塔机或塔机的一部分包围起来,球体代表塔机或塔机的一部分。这样通过判断两球的若有交集则引起碰撞事故。但是,模型简化的同时也造成了准确度的偏差,需要提高准确度。采用将大球体分成小圆圈的办法,检测小球体间是否有交集。如此不停的分割检测,直到获得适合半径的球体为止。这样可以在分割并分层的思想条件下把准确的提高。
齐次变换方法核心是在n+1维空间里解决n维空间的问题。具体方法是用 n+1个元素的向量表示有n个元素的向量的办法,在一个向量乘以一个比例因子是齐次变换的手段。向量的意义不随着向量的每个分量与固定常数相乘而改变。在齐次变换中,三维图形的平移、比例及旋转变换是对二维图形变换的扩展,即三维情况下应附加考虑z坐标的变换。若想对三维图形进行扩展,需要4*4阶变换矩阵。齐次坐标变换矩阵T可以完成三维立体图的伸缩、旋转、平移和透视变换等行为。
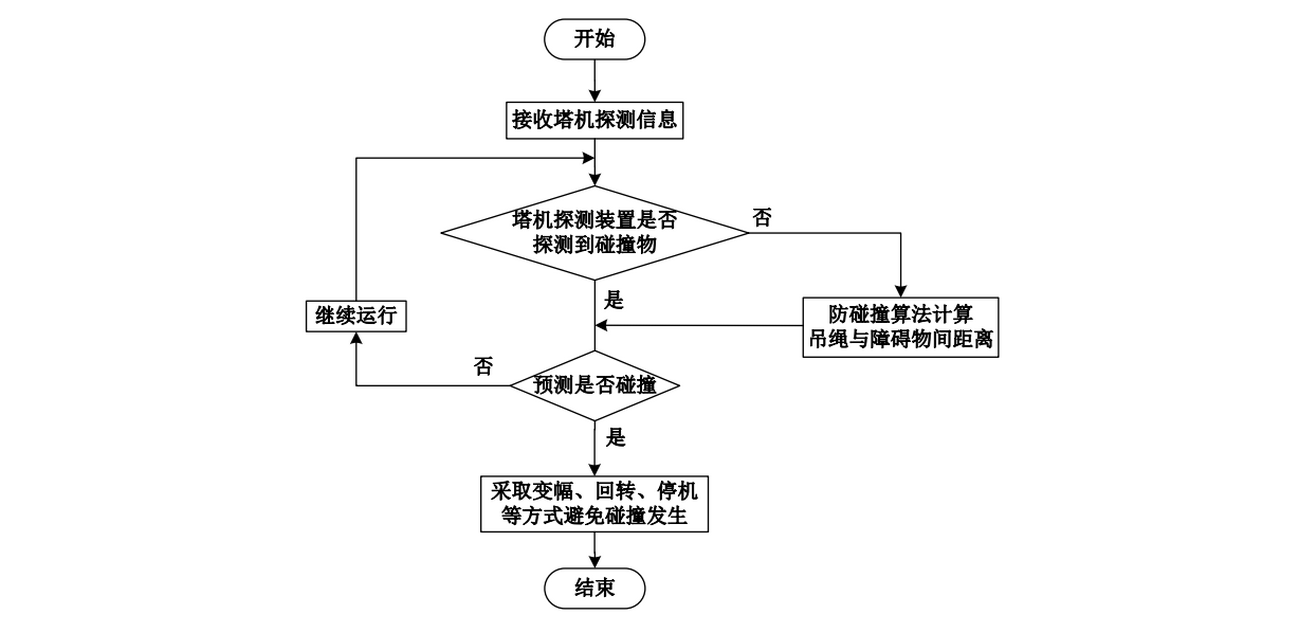
本节主要判断吊绳、吊钩与障碍物的碰撞问题,可以采用包围球与齐次变换相结合的算法研究,既能减少运算量,又能提高防碰撞的精度。在塔机吊钩的高度低于障碍物的高度前提下,吊钩进入障碍物的影响区域即目测可能发生碰撞的位置,将障碍物与吊钩的包围球投影在水平面上,判断水平面投影是否有交集,如果没有交集则表示吊绳与障碍物没有可能发生碰撞,塔吊可以持续运行。如果有交集对吊绳进行下一层次包围球的划分,并且遍历包围球。通过坐标的齐次变换计算出吊绳与障碍物的球心距。若球心距小于两包围球的半径和,则表示障碍物与吊绳或者吊钩有可能发生碰撞,需要进行坐标的具体计算,预测是否有可能发生碰撞。如果坐标值不在安全范围内,则塔机系统进行回转变幅运动或者报警停机等相应的防碰撞措施[42]。具体流程图如 4-2 所示:
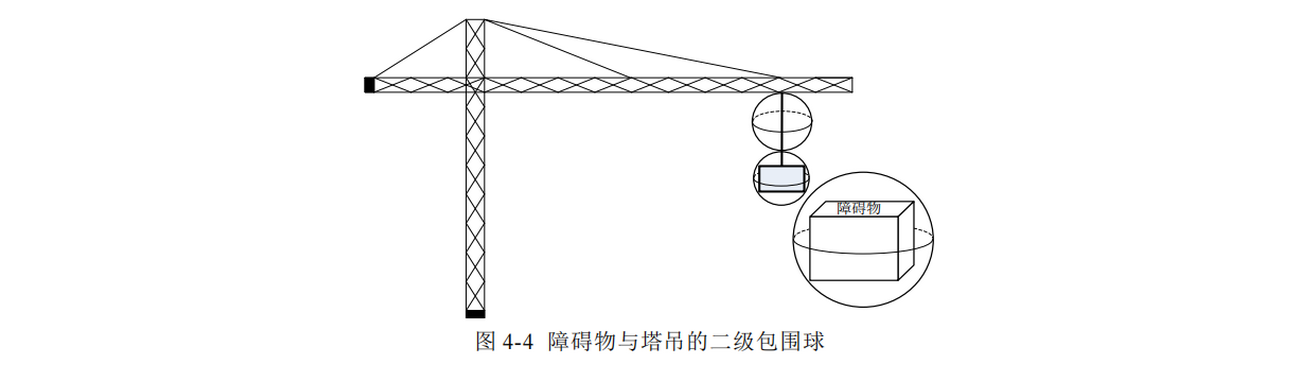
让包围球在水平面上做出投影是判断两个塔吊包围球是否相交的办法,若投影到水平面的两圆有相交的部分,表示塔机吊臂可能在同一空间工作;下一步继续细化塔机的外接包围球,因为障碍物模型本身结构简单,所以对障碍物的包围球就不需要进一步的划分,如图4-4所示;对所有包围球进行相交测试,完成所有的层次包围球的遍历后,如果存在两个包围球在空间相交时,需要判断两球的半径和与球心距的关系。本文设计的算法研究只对群塔中有交集的两部分进行算法研究。
3. 齐次变换运算
确定塔吊与障碍物的位置关系最好办法是建立一个坐标系统,在群塔作业区域选择一个适合的参考坐标系O,且坐标原点o=[x y z] 以同样的方式在塔机上确定O1坐标系,并将塔机与塔臂的交叉点设为中心,坐标o1 =[x1 y1 z1 ]参考系O2设立在周围的障碍物处,坐标o2 =[x2 y2 z2 ]。塔机上O1坐标系相对于参考坐标系是运动的,故可以得到相对矩阵
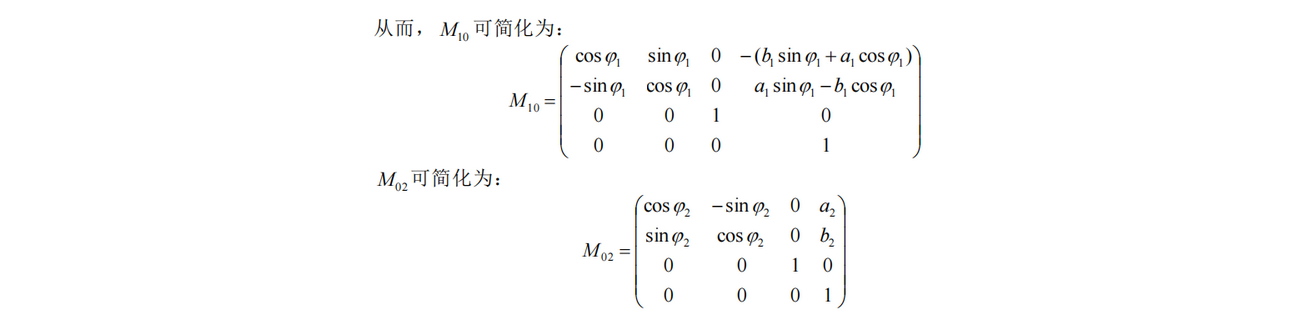
在塔机1上可以写出从坐标系1经过齐次坐标变换到坐标系0下的矩阵M01和矩阵M10(表示从参考系0经过齐次坐标变换到参考系1内的矩阵)。

其中x01,y01,z01为O1坐标系的原点在参考坐标系O内的坐标,jx1,x表示从x1轴按逆时针旋转到x轴的旋转度数,其它角度按相同原则获得。

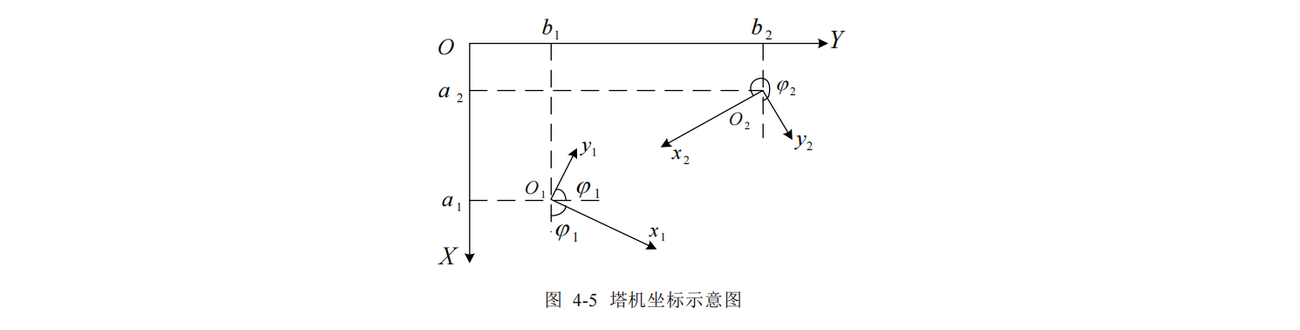
式中x10,y10,z10表示将参考系的原点通过某种方式置换到塔机1坐标系中的产生坐标。根据上面的规则,在坐标系O2上可以获得相近似的矩阵。有M20、M0等。涉及到群塔机共同作业的特殊环境下,可以通过将障碍物及塔机的坐标系所在的XOY平面对比工地参考坐标系的平面平行的方法,将公式简化[46]。以图4-5为例起重机吊臂所在的直线为x轴,令x轴的箭头指向塔吊长臂方向;高度均由坐标z表示,z轴的正方向取垂直地面的方向;在三维坐标系中y轴的方向可由右手定则确定。角度的问题做了如下规定:逆时针方向转动参考坐标系的x轴,当经过j1角度时与x1轴重合;旋转到x2轴的角度为j 2。角度j的取值区间为 0°~360°。
4. 塔吊防碰撞
根据塔机与障碍物的包围球进行相交检测后,碰撞系统可以初步的进行碰撞判断;再由上面的齐次变换矩阵基本可以得到两碰撞可能的塔机或障碍物相对位置,下面用障碍物与吊钩为例来呈现防碰撞算法的研究过程,如图所示。
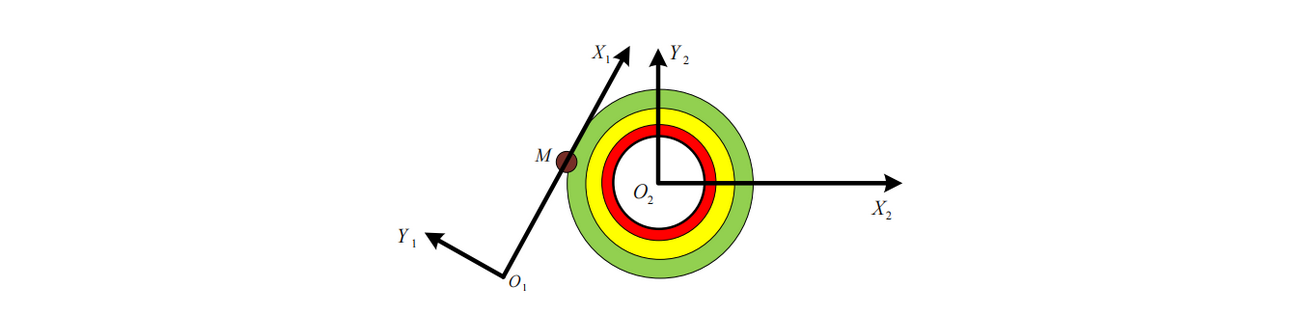
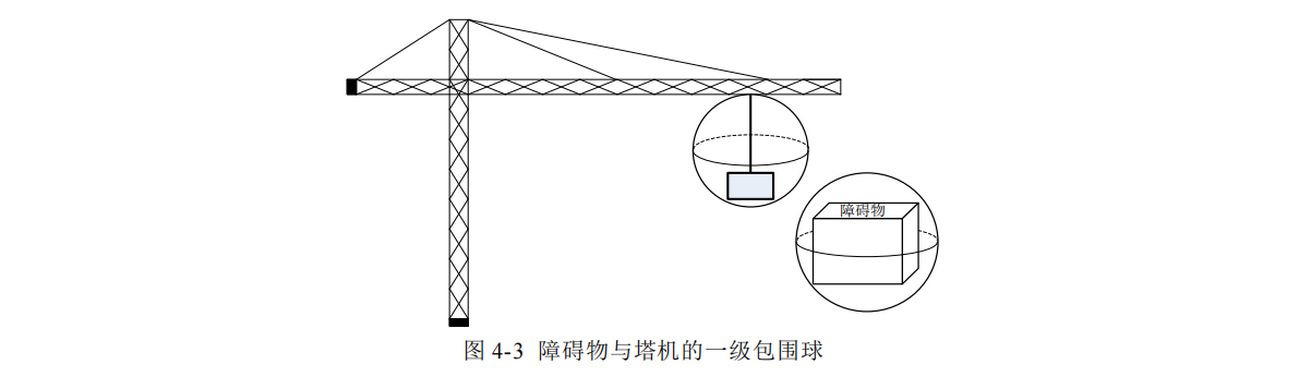
假设塔机运行时吊钩低于障碍物,而塔机吊臂高于障碍物,采用一级包围球进行相交检测,若包围球有交集,表示吊钩进入障碍物的一级影响区域,绿颜色区域即障碍物与吊钩一级包围球相交的影响区域。塔机开始缓慢回转进行二级包围球相交测试提高精度。若吊钩与障碍物的二级包围球相交表示障碍物有可能发生碰撞,由此规划出障碍物的影响范围。接下来采用齐次坐标变换的方法将吊钩和障碍物变换到一个参考坐标系下,算出两包围球相切的位置,规划出吊钩的运行轨迹。M点为塔机1吊臂上小车的运行位置,坐标为 (x1 y1 z1 ) = (x1m 0 H1 ),由(4-11)式能求得M点在障碍物坐标系O2中的位置坐标(x2 y2 z2 )。其中 x2 , y2 是碰撞算法所需要的数据,当MO2 < R时,碰撞会在障碍物与起重机的吊钩之间发生。
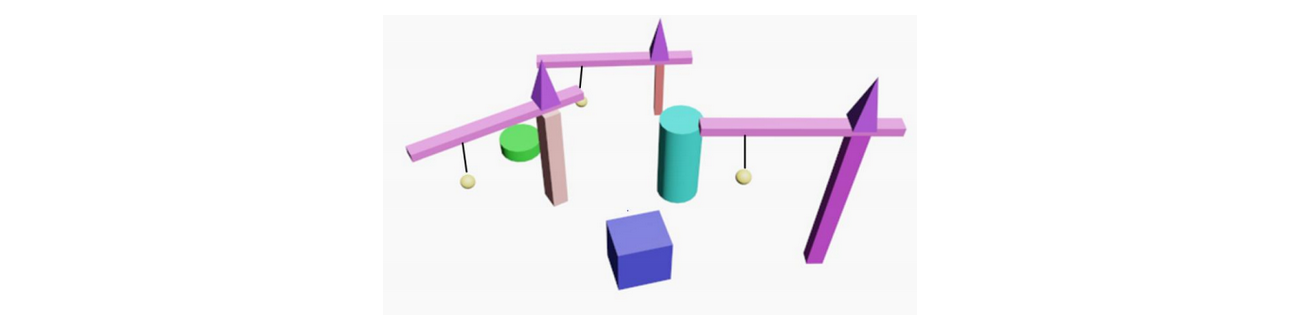
5. 塔吊防碰撞仿真
仿真选取塔吊型号为 QTZ63,起重臂长 45m。在多塔吊同时作业的的工地上,塔吊不可避免的交叉作业,容易引起碰撞事故。障碍物和塔吊群的三维立体模型图由三维软件 3DMAX 构建,如图所示,塔吊布置均高于区域障碍物,而吊钩的位置都低于障碍物,所以用防碰撞算法来避免吊绳与障碍物之间的碰撞问题。
在有多个障碍物的环境下塔吊群共同作业时,塔吊的碰撞事故更容易发生,在复杂的工作环境下,通过我们的算法研究塔吊仍然可以顺利的避开障碍物,到达目标位置。图 4-8 为三台塔机同时施工的区域的俯视图,颜色深的区域是障碍物所在的位置,区域 A、B、C 为塔吊干涉区域。
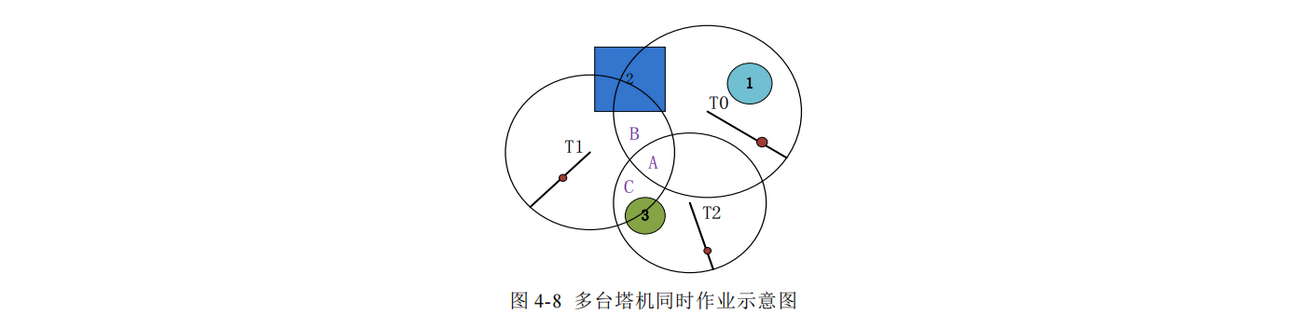
以塔机T0的目标点为(3.4 rad,40 m)为例,塔机 T0 沿逆时针运转到目标点,需要经过两个障碍物,之后进入 T0 与 T1 的干涉区域 B 内,根据塔吊防碰撞算法研究,在塔吊逆时针运行的过程中,始终采用一级包围球将吊绳和障碍物包围起来,不断的进行包围球的相交测试。当 T0 靠近障碍物 1 时两个包围球相交,塔吊吊臂运动放缓,进行二级包围球的相交测试,并开始向外做变幅运动。当二级包围球有交集时,采用齐次坐标变换的方法将两个二级包围球相切的位置转换到参考坐标系内,利用这两种算法不停的计算,求得吊钩与障碍物相切的轨迹,算出障碍物的影响范围。根据障碍物的影响范围,T0吊钩为避免和障碍物1发生碰撞,最好从障碍物1的外围运动;对于障碍物2塔吊的吊钩只能从障碍物2的内侧走过,到达目标点。
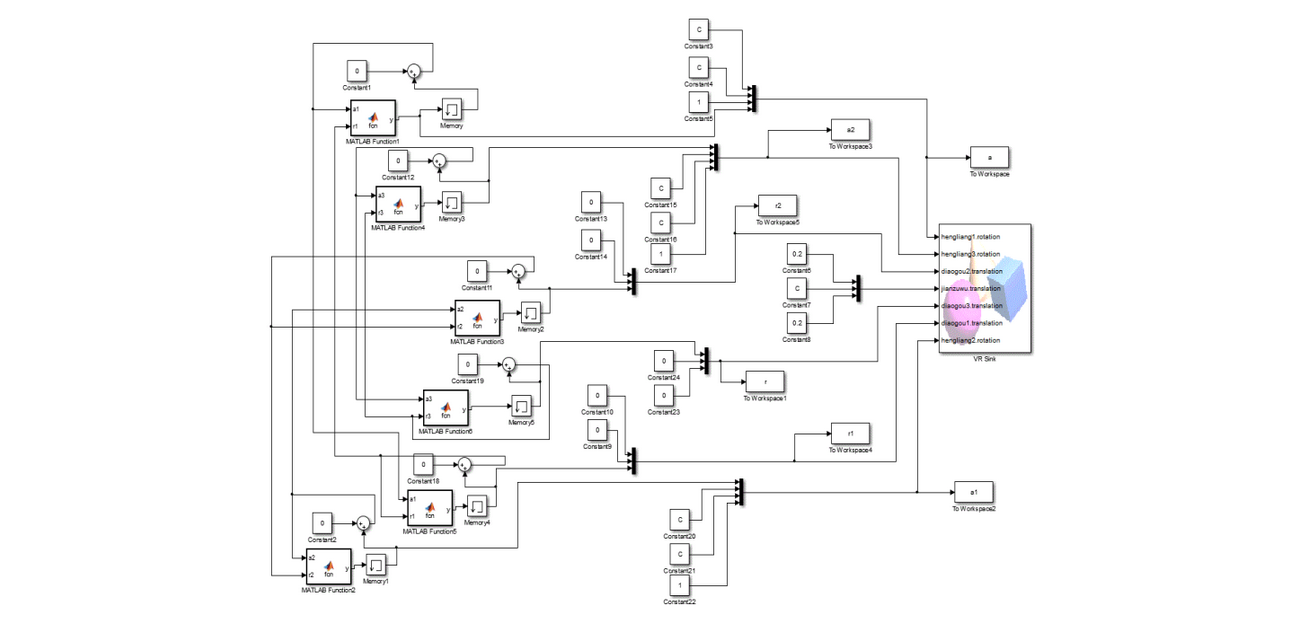
将塔吊群作业防碰撞的算法进行的Matlab仿真。将塔吊与障碍物的模型导入到Matlab中。采用Simulink工具箱内虚拟现实技术完成塔吊群作业时,避免碰撞的虚拟现实算法仿真。图4-9为群塔机作业的的仿真图。该模型以塔机的基座为中心坐标,三个障碍物摆放在固定位置。将塔吊群作业的算法写入MatlabFunction 模块中,输出塔机的幅度和回转角度;完成塔机吊臂的转动,和小车幅度的改变,实现仿真环境的真实化。在Matlab Workspace中存储幅度和回转角度。在仿真过程中通过吊臂的旋转和幅度的变换来避免与障碍物的碰撞。
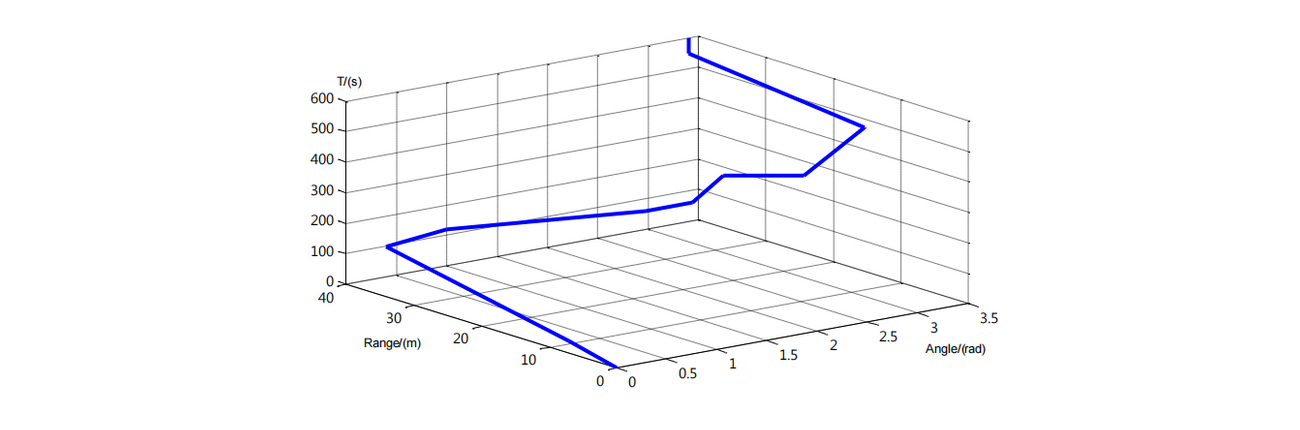
根据仿真结果可以看到吊钩从初始位置向外变幅朝目标位置运动。当塔机运动到障碍物1的影响范围时,吊钩开始向外做变幅运动,当幅度超过30m到达40m时,包围球之间相切,吊钩在障碍物1外围安全运动,塔机回转离开障碍物1的影响范围时,安全避开障碍物1继续向目标位置运动;塔机继续逆时针转动靠近障碍物2,吊钩开始向内做变幅运动,同理当塔机回转2.1rad时,进入障碍物2的影响范围区域,吊钩继续向内做变幅运动,当幅度小于11m时,吊钩在障碍物2的内侧运动,塔机回转至3.4rad塔机安全避开障碍物2继续向目标位置运动;此时塔机T0进入干涉区域B,若干涉区域内有T1塔机等待塔机T1离开干涉区域后,塔机T0继续回转变幅至目标位置。仿真通过防碰撞算法作用在三维立体模型中,模拟出塔吊运动的场景,建立塔机T0的运行轨迹,如果T0能够顺利的躲避各个固定位置的障碍物和运动屮的塔机,防止碰撞的发生,证明防碰撞算法可行图4-10为塔吊群作业时,T0 塔机的吊钩运行轨迹。
6.总结
本文主要介绍了塔吊群作业时防碰撞算法的研究,在塔吊臂安装探测器终端的基础上,采用层次包围盒算法可以粗略的判断塔吊之间是否有碰撞的可能,用齐次变换的方法精准的算出有碰撞可能之间的物体距离,采用两种算法想结合的思想来解决塔吊群作业时发生的碰撞问题,使塔吊通过回转和变幅的方法避免碰撞的发生。并使用了matlab软件进行防碰撞算法的实验仿真,确定可行性。
西安天网云智慧工地解决方案一直致力于推广西安智慧工地、西安塔吊防碰撞租赁、西安劳务实名制、AI视频检测等智慧平台相关技术,在工程施工阶段的应用将会为工地数字化管理注入源源不断的强大动力。解决现场施工安全问题,提高管理效率,有效促进了工地管理模式的转型升级。